Experimental Setup
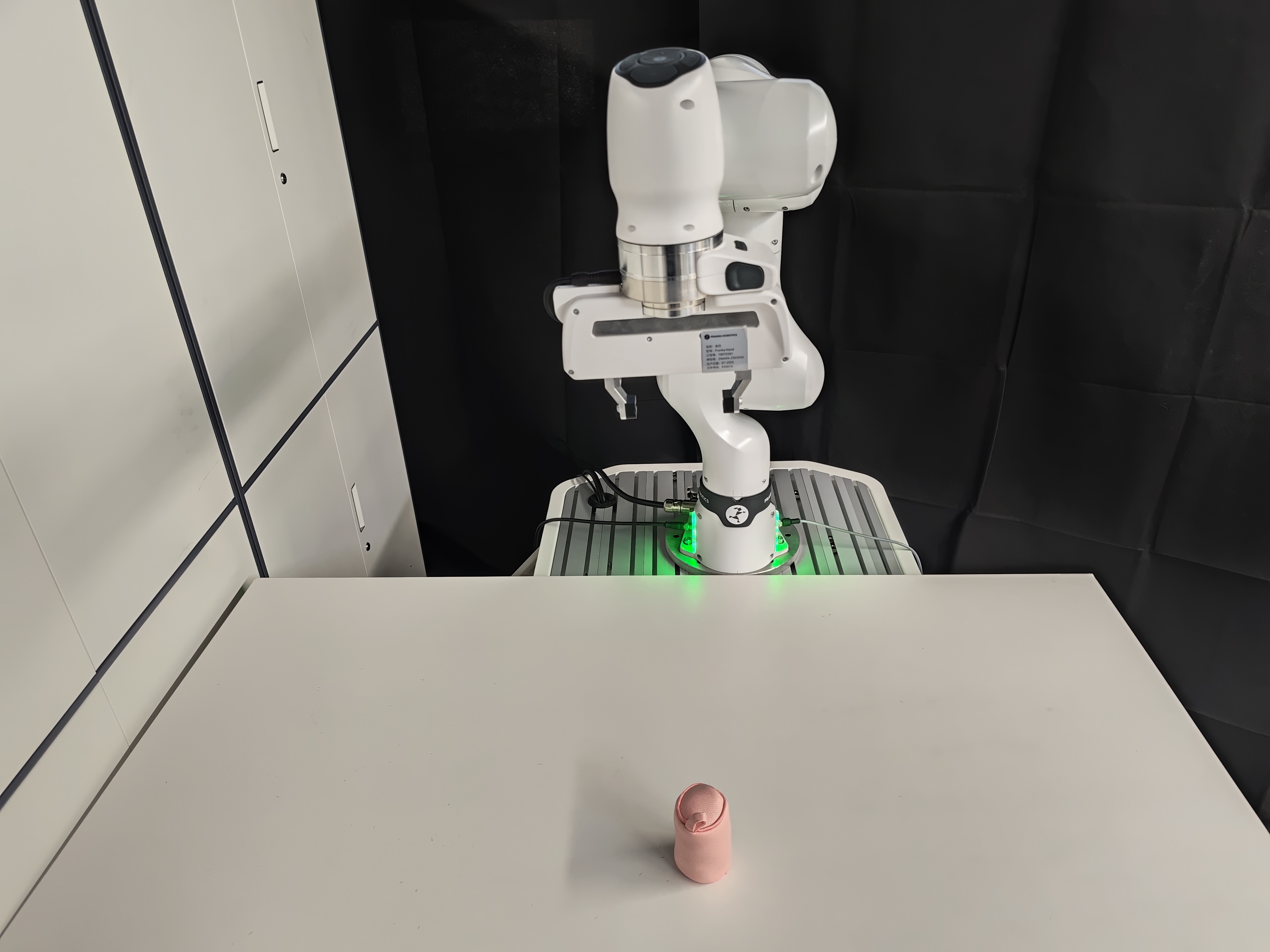
Front view

Side view
Task Description
We evaluate our method on the Pick-and-Release task in a real-world setting. In this task, the robot is required to grasp a soft bag whose diameter is approximately 80% of the gripper's jaw width. This scenario poses a challenge to the robot's real-time manipulation capabilities, particularly in maintaining a stable operating posture and precisely coordinating the timing of the gripper's opening and closing in high speed, as the bag is prone to toppling during execution.
Hardware Setup
- Robot Arm: Franka Research 3
- Camera: UGREEN CM717
- GPU: NVIDIA GeForce RTX 4090D
Qualitative Comparisons
Comparisons of different acceleration methods on the Pick-and-Release task. BAC achieves high inference frequency with low end-to-end latency.
DDPM 100 steps
FailureFrequency 7.8 Hz
Latency 180 s
DDPM 30 steps
Frequency 19.4 Hz
Latency 54 s
DDIM 50 steps
Frequency 15.6 Hz
Latency 25 s
Uniform S=20
Frequency 28.1 Hz
Latency 52 s
Ours
BAC S=7
Frequency 39.2 Hz
Latency 15 s
Ours (Fastest)
BAC S=5
Frequency 45.1 Hz
Latency 13 s